OS Organization with Virtualization
Scribes: Peter Chang and Ruolin Fan
Hard Modularity
"Don't trust other modules" because of...
There are two techniques to implement hard modularity
- Client-Service
// Sample code that implements a factorial call
// Client Code:
send (fact_port,{"!",6}); //example: we want to compute 6!
receive (fact_port, response);
if (response.opcode == "ok")
print (response.val);
else
print ("error %d", response.errorcode);
// Server Code:
for (;;) { //go in loops and wait for request from the client
receive (fact_port,request);
if (request.opcode == "!") {
n = request,val;
for (int i = 2; i <= n; i++)
n *= i;
response = {"ok", n};
} else
response = {"ng", 29}; //error opcode "ng" and error code 29
send (fact_port, response);
}
Some pluses and minuses for this kind of technique:
- + Limited the error propagation
- No shared states
- Client loops will not compromise the server. Vice versa.
- - Uses more resources
- Requires multiple machines (or virtual machines)
- Interpreting messages slows down main computations (marshalling)
- - Less Security
- Messages can be intercepted, or faulty messages can be sent.
- Example: Kaminsky DNS design flaw
- - Harder to deploy
Overall: although this technique successfully solved the problem at
hand, its implementation has many drawbacks that, if used for small projects
like calculating a factorial function, is not feasible sense because of its
resource-hogging and complexity.
- Virtualization:
To implement OS virtualization, the OS gives a "pretend machine" to the
application. This way, the application can not inadvertently modify sensitive
system data directly. The computer in which the application runs is virtualized
into components like virtual memory and a virtualized CPU. Any action that the
application does that requires modification of system data must be done through
a "middle man" such as the system kernel. One simple implementation is an X86
emulator. The OS runs an application inside emulator, which would check all the
memory references and IO instructions.
Some pluses and minuses:
- + No direct access to I/O or sensitive devices
- + Can catch infinite loops inside application
- The virtual machine can identify application loops and switch
control to another application.
- - Slower
- Traditionally by a factor of approximately 10
- Client loops will not compromise the server. Vice versa.
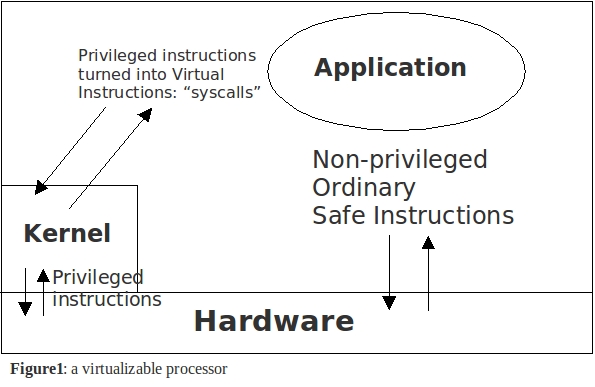
Since virtualization using an emulator very slow, we try to achieve
better performance through hardware level control structures such as the
virtualizable processor
There are two ways to call the kernel:
- Ordinary function calls
- This way is fast, supported, but unsafe
- Very popular in embedded applications
- Protected transfer of control
- When an unsafe instruction is executed, the hardware traps, and
the kernel takes control (the kernel can run any instructions)
But what is a kernel? The kernel is the key part of an operating system
that can execute any instructions; it is the core of the operating system.
Hardware Trap
Possible causes:
- Hardware device interrupt
- CPU timer
- Invalid instruction
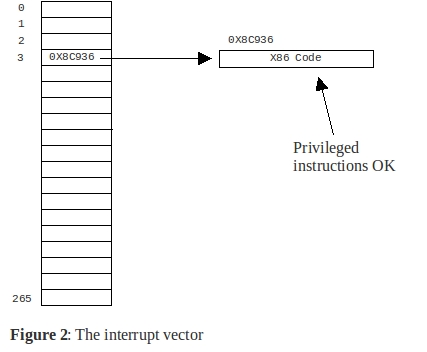
The kernel keeps an interrupt vector like the following, which is made up of
265 words, with each word being a pointer to a privileged instruction that it
can execute.
The trap executes as follows:
- Push the following things onto stack (note: the kernel stack, not
application stack):
|
ss
|
Stack Segment (identities stack)
|
|
esp
|
Extended Stack Pointer
|
|
eflags
|
|
|
cs
|
Code Segment
|
|
eip
|
Instruction Pointer (return address)
|
- eip = iv[trap#]
|
error code
|
More details of trap
|
- A RETI instruction at the end of the kernel stack "returns" to the
program that made the syscall
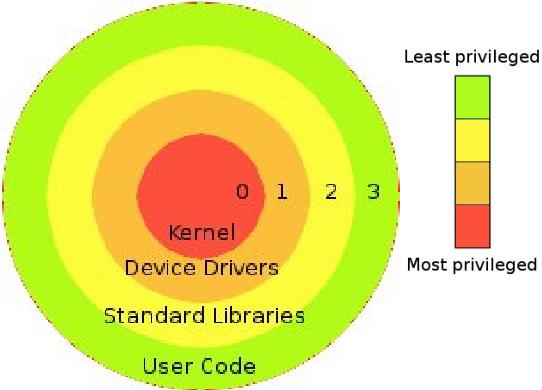
Figure
3: the standard protection system, or hierarchy of privileges.
So how do we do syscalls?
One solution: while(1); or for(;;)
- This will catch the kernel's attention when the kernel does one of its
regular interrupts (around every 10 ms) because of the infinite loop. However,
this approach is far too slow.
Another solution: *(char*)0 = 'x';
- Referencing invalid addresses such as trying to place something in the
forbidden zone will cause a trap. However, it is too likely to be accidental.
The proper way to do syscalls in X86:
- Use the privileged interrupt
INT 0X80. This generates a trap
of type 128. INT 0X80 is a one-byte instruction that specifically
interrupts the kernel. For example, read(a,b,c); Will internally
call INT 0X80 to make the syscall.
But how are a, b, and c passed?
%ecx c //This is the assembly code for "read"
%ebx b // ... read.s
%eax a
INT 0X80
Result %eax
Overall, syscall is like a function call except:
- It crosses protection domains
- More data must be saved/restored
- It's slower
- It has hard modularity
Components of the machine that may need virtualization
- ALU
- You must be careful about saving/restoring the ALU state when
crossing protection domains. (e.g.: V C N Z flags)
- Otherwise, clients should have full access the the ALU.
- Registers
- Most registers are full-access.
- Some registers are privileged. (e.g.: Privilege register, Virtual
memory control)
- Cache
- Virtualization of the cache is not much of a protection issue as it
is a performance issue.
- The cache is meant to be fast and virtualization just slows down what
limited cache there is.
- Primary Memory (RAM)
- User memory is accessible at full speed.
- However, the system should trap if the user tries to access
"forbidden zones".
- I/O Devices
- Typically privileged.
- Exceptions: Graphical display output for streaming video and
games.
What can go wrong?
- Infinite Application Loops
An application can
encounter an infinte loop due to any number of reasons. In this case, the
kernel is often programmed to provide a forced interrupt every 10 ms in which
it can decide to force an application to stop running and transfer cpu
resources to another application. This prevents infinite loops in user
applications to crash the system.
- Illegal Application Memory Access
An
application can refer to illegal memory locations. Systems employ memory
management and protection mechanisms in the kernel to prevent applications from
actualling doing damage in the illegal memory addresses.
- Infinite Kernel Loops
A kernel that encounters
an infinite loop will have no way to resume any other process in the computer.
This results in a complete system failure since there is nothing to "interrupt"
the kernel itself.
- Illegal Kernel Memory Access
A kernel that
tries to access an invalid memory address will never be prevented from doing
so. This almost always results in a system failure as errors resulting from the
illegal access is propogated throught the system.
- Simultaneous register access
An application
can end up accessing the same registers used in another application. To help
prevent such situations, we resort to context switching between applications so
that an application's registers can be overwritten and reused when the
application is not running.
Context Switching
Context switching is the act of suspending one process and resuming another.
This is what schedule() does in wensyos1. This is done by saving
and restoring an application's registers such as the eax, ebp, and esp
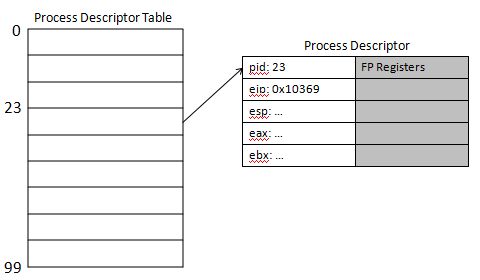
registers. These registers are found in the process' "process descriptor". Each
process has a process descriptor which is stored in the OS' "process descriptor
table".
However, as applications and hardware get more complex, a system may require
more registers to run each application. To solve this problem, we split process
registers into "common" (eax, ebp, eip) and "uncommon" (Floating Point
Registers) parts, saving only the common registers and specified uncommon
registers and letting the other registers be reused.
Figure 4: Process
Description Tables.
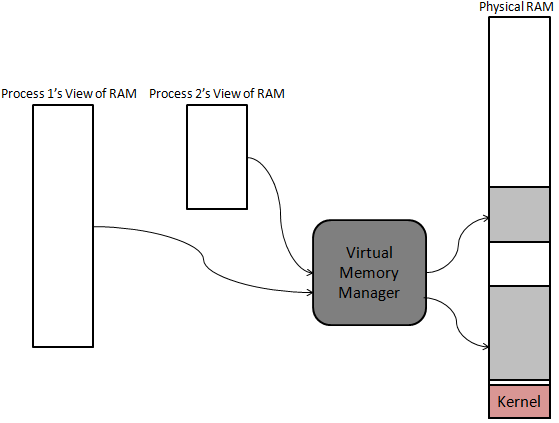
Virtual Memory Addressing
Virtual memory allocation is implemented with the aid of a Virtual Memory
Manager (VMM). The VMM is a kernel process that allows user processes to
believe that they have been given one neatly allocated block of RAM in which to
run off of. In reality, the VMM may translate the memory addresses used by a
process into an actual physical memory address that, unlike figure 5, may be
scattered and fragmented throuought the physical RAM. Although this step of
translating memory addresses may slow down the overall system because of the
addition of another layer of complexity, this feature resolves the important
issue of programs accessing "forbidden" memory addresses. In effect, the VMM
can completely hide the memory used by, say, the kernel itself.
Figure 5: Virtual Memory
Management.
Device Access
Robustness is a very important issue when dealing with hardware device
access. Every system is built from many different devices with lots of
variation and "weird" features between devices. This variation requires a
robust interface to protect each device from each other and the user. We do not
want to have situations in which a piece of code may accidentally or
intentionally set something on fire. More realistically, we do not want code to
be modifying sensitive data on a hard drive unknowingly.
As programmers, we want a clean interface to intaract with devices that will
conform to our standards of abstraction and modularity. We don't want to have
to deal with the low level details of how to read and write to and from a
device, let alone how to deal with the differences between different devices
and how reading and writing applies to them.
- Two Classes of Devices
-
- Asynchronous (Streaming)
- Synchronous (Random Access)
Each class of devices has their own set of device access operations that
make sense to the devices in that class. For example, it would not make sense
for a program to use lseek() on an asynchronous device such as a
mouse. However, both the asynchronous and synchronous devices listed above make
sense to have a read() operation.